
Definición
El motor monofasico de inducción, es
un motor de corriente alterna, que se caracteriza por tener un par de arranque
moderado, este motor se conecta normalmente a una red monofásica de alumbrado o
de fuerza, este se encuentra provisto de un arrollamiento auxiliar desplazado
magnéticamente respecto al arrollamiento principal y conectado en paralelo con
este último.
Este tipo de motor se caracteriza
porque para poder llevar acabo su puesta en marcha se auxilia de un devanado
secundario llamado de arranque, el cual va conectado en serie a un capacitor y
los dos se encuentran controlados por un interruptor que se abre cuando el
motor ha alcanzado el 75% de su velocidad nominal.
Simbología del motor monofásico
Simbología del motor monofásico

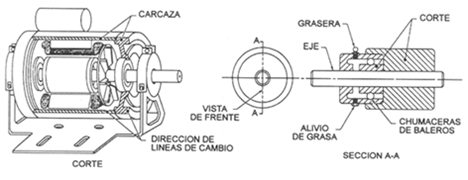
Partes del motor monofásico
Fundamentalmente los motores
monofásicos de inducción cuentan con un estator construido de material
ferromagnético (por ejemplo, chapas de hierro al silicio) sobre el que se colocan
las bobinas principales, tantas como polos tenga el motor. En la figura se
puede ver, además, un rotor de características similares al estator, rodeado de
barras conductoras cortocircuitadas en los extremos por anillos formando una
“jaula de ardilla” típica de los motores de inducción.
Estas sencillas máquinas conservan la
propiedad fundamental de no poseer contactos eléctricos rozantes lo que les
confiere una durabilidad muy alta y muy bajo mantenimiento.
Los motores de inducción monofásicos
llevan un estator en cuyo paquete de chapas van alojados dos bobinados de
Cobre. El bobinado principal, que suele denominarse arrollamiento principal va
colocado en 2/3 de las ranuras del estator y sus conexiones llevan las
designaciones Ul, U2. El arrollamiento auxiliar (bobinado auxiliar) Zl, Z2 va
alojado en el tercio restante de ranuras, desfasado en el espacio 90º.
En cuanto a la construcción del motor monofásico
de inducción, hay que señalar que el rotor de cualquier motor monofásico de
inducción es intercambiable con algunos polifásicos de jaula de ardilla. No hay
conexión física entre el rotor y el estator, y hay un entrehierro uniforme
entre ellos.

Representación gráfica

Tipos de motores
Motor monofásico de fase partida.
Este tipo de motor tiene dos
devanados bien diferenciados, un devanado principal y otro devanado auxiliar.
El devanado auxiliar es el que provoca el arranque del motor, gracias a que
desfasa un flujo magnético respecto al flujo del devanado principal, de esta
manera, logra tener dos fases en el momento del arranque.
Al tener el devanado auxiliar la
corriente desfasada respecto a la corriente principal, se genera un campo
magnético que facilita el giro del rotor. Cuando la velocidad del giro del
rotor acelera el par de motor aumenta. Cuando dicha velocidad está próxima al
sincronismo, se logran alcanzar un par de motor tan elevado como en un motor
trifásico, o casi. Cuando la velocidad alcanza un 75 % de sincronismo, el
devanado auxiliar se desconecta gracias a un interruptor centrífugo que llevan
incorporados estos motores de serie, lo cual hace que el motor solo funcione
con el devanado principal.
Este tipo de motor dispone de un
rotor de jaula de ardilla como los utilizados en los motores trifásicos.
El par de motor de éstos motores
oscila entre 1500 y 3000 r.p.m., dependiendo si el motor es de 2 ó 4 polos,
teniendo unas tensiones de 125 y 220 V. La velocidad es prácticamente
constante. Para invertir el giro del motor se intercambian los cables de uno
solo de los devanados (principal o auxiliar), algo que se puede realizar
facilmente en la caja de conexiones o bornes que viene de serie con el motor.

Motores de inducción-repulsión: Los motores de inducción-repulsión se aplican donde se requiere arrancar cargas pesadas sin demandar demasiada corriente. Se fabrican de 1/2 HP hasta 20 HP, y se aplican con cargas típicas como: compresores de aire grandes, equipo de refrigeración,
etc.
Motores de arranque con capacitor: Este tipo de motor es similar en su construcción al de fase partida, excepto que se conecta un capacitor en serie con el devanado de arranque para tener un mayor par de arranque. Su rango de operación va desde fracciones de HP hasta 15 HP. Es utilizado ampliamente en muchas aplicaciones de tipo monofásico, tales como accionamiento de máquinas herramientas (taladros, pulidoras, etcétera), compresores de aire, refrigeradores, etc. En la figura se muestra un motor de arranque con capacitor.

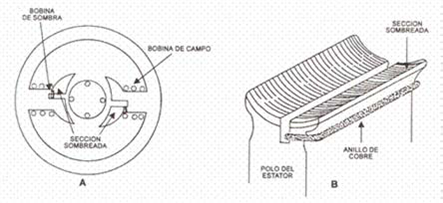
Motores de polos sombreados: Este
tipo de motores es usado en casos específicos, que tienen requerimientos de
potencia muy bajos.
Su rango de potencia está comprendido
en valores desde 0.0007 HP hasta 1/4HP, y la mayoría se fabrica en el rango de
1/100 a 1/20 de HP. La principal ventaja de estos motores es su simplicidad de
construcción, su confiabilidad y su robustez, además, tienen un bajo costo. A
diferencia de otros motores monofásicos de C.A., los motores de fase partida no
requieren de partes auxiliares (capacitores, escobillas, conmutadores, etc.) o
partes móviles (switches centrífugos). Esto hace que su mantenimiento sea mínimo
y relativamente sencillo.

Los motores universales son
motores en serie de potencia fraccional, de corriente alterna, diseñados
especialmente para usarse en potencia ya sea de corriente continua o de
corriente alterna. Recordemos que el motor serie de corriente continua se
caracteriza por disponer de un fuerte par de arranque y que la velocidad del
rotor varía en sentido inverso de la carga, pudiendo llegar a embalarse cuando
funciona en vacío. Estos motores tienen la misma característica de velocidad y
par cuando funcionan en c.a. o en c.c. En general, los motores universales
pequeños no requieren devanados compensadores debido a que el número de espiras
de su armadura es reducido y por lo tanto, también lo será su reactancia de
armadura. Como resultado, los motores inferiores a 3/8 de caballo de fuerza
generalmente se construyen sin compensación. El costo de los motores
universales no compensados es relativamente bajo por lo que su aplicación es
muy común en aparatos domésticos ligeros, por ejemplo: aspiradoras, taladros de
mano, licuadoras, etc. El motor universal es sin duda, el más utilizado en la
industria del electrodoméstico. Su nombre deriva del hecho de que puede
funcionar tanto en corriente alterna como en corriente continua. Para que un
motor de este tipo pueda funcionar con c.a. es necesario que el empilado de
suinductor (el núcleo de los electroimanes) sea de chapa magnética para evitar
las corrientes de Foucault. Por otra parte, la conmutación resulta en los
motores universales que en los de corriente continua, por lo que la vida de las
escobillas y el colector es más corta, inconveniente que reduce mucho el campo
de aplicación de los motores universales.
Los motores universales grandes
tienen algún tipo de compensación. Normalmente se trata del devanado
compensador del motor serie o un devanado de campo distribuidoespecialmente
para contrarrestar los problemas de la reacción de armadura.
Su esquema de conexiones y sus
características de funcionamiento corresponden a las de un motor serie.
El estator de los motores
universales que se utilizan en electrodomésticos (y también para otros
servicios) suele ser bipolar, con dos bobinas inductoras.
La parte más delicada y de
construcción más laboriosa de estos motores es el rotor o inducido. Núcleo,
bobinados, colector y eje requieren una construcción muy cuidada. En general,
los motores universales para electrodomésticos están calculados para girar a
altas velocidades; y como los entrehierros son pequeños, cualquier
descentramiento o desequilibrio existente en el conjunto rotor produce
vibraciones que pueden perturbar el funcionamiento y dañar seriamente el motor.
Estos motores se someten a una operación de equilibrado que se efectúa con
complicados instrumentos electrónicos.
El eje, que gira a gran
velocidad, debe sustentarse en rodamientos de bolas o sobre casquillos de
bronce poroso autolubricantes.
La velocidad de estos motores
depende de la carga: a más carga, menos velocidad y viceversa. Esta propiedad y
el poseer un elevado par de arranque son lo más característico de los motores
universales.
Motores de inducción de fase partida
Este tipo de motor tiene una buena
eficacia y un par de arranque moderado. Son muy utilizados como motores de
accionamiento para lavadoras, secadoras y lavavajillas.
Motores de inducción de arranque por
condensador
Tienen el mismo rendimiento durante
el funcionamiento que los motores de fase partida, pero un par de arranque más
elevado. Se utilizan principalmente en sistemas de accionamiento de lavadoras.
Motores de condensador dividido
permanente
Las principales características de
este motor son su alta eficiencia, el funcionamiento silencioso y la
reversibilidad continua. Esto hace que sea adecuado para una amplia gama de
electrodomésticos, tales como lavadoras, secadoras, ventiladores y aparatos de
aire acondicionado.
Motores de polos partidos
Son adecuados para aplicaciones de
baja potencia (menos de 200 W). Se utilizan habitualmente en ventiladores
domésticos pequeños
Los motores universales son motores
en serie de potencia fraccional, de corriente alterna, diseñados especialmente
para usarse en potencia ya sea de corriente continua o de corriente alterna.
Recordemos que el motor serie de corriente continua se caracteriza por disponer
de un fuerte par de arranque y que la velocidad del rotor varía en sentido
inverso de la carga, pudiendo llegar a embalarse cuando funciona en vacío.
Estos motores tienen la misma característica de velocidad y par cuando
funcionan en c.a. o en c.c. En general, los motores universales pequeños no
requieren devanados compensadores debido a que el número de espiras de su
armadura es reducido y por lo tanto, también lo será su reactancia de armadura.
Como resultado, los motores inferiores a 3/8 de caballo de fuerza generalmente
se construyen sin compensación. El costo de los motores universales no
compensados es relativamente bajo por lo que su aplicación es muy común en
aparatos domésticos ligeros, por ejemplo: aspiradoras, taladros de mano,
licuadoras, etc. El motor universal es sin duda, el más utilizado en la
industria del electrodoméstico. Su nombre deriva del hecho de que puede
funcionar tanto en corriente alterna como en corriente continua. Para que un
motor de este tipo pueda funcionar con c.a. es necesario que el empilado de
suinductor (el núcleo de los electroimanes) sea de chapa magnética para evitar
las corrientes de Foucault. Por otra parte, la conmutación resulta en los
motores universales que en los de corriente continua, por lo que la vida de las
escobillas y el colector es más corta, inconveniente que reduce mucho el campo
de aplicación de los motores universales.
Los motores universales grandes
tienen algún tipo de compensación. Normalmente se trata del devanado
compensador del motor serie o un devanado de campo distribuidoespecialmente
para contrarrestar los problemas de la reacción de armadura.
Su esquema de conexiones y sus
características de funcionamiento corresponden a las de un motor serie.
El estator de los motores universales que se utilizan en
electrodomésticos (y también para otros servicios) suele ser bipolar, con dos
bobinas inductoras.
La parte más delicada y de construcción más laboriosa de
estos motores es el rotor o inducido. Núcleo, bobinados, colector y eje
requieren una construcción muy cuidada. En general, los motores universales
para electrodomésticos están calculados para girar a altas velocidades; y como
los entrehierros son pequeños, cualquier descentramiento o desequilibrio
existente en el conjunto rotor produce vibraciones que pueden perturbar el
funcionamiento y dañar seriamente el motor. Estos motores se someten a una
operación de equilibrado que se efectúa con complicados instrumentos
electrónicos.
El eje, que gira a gran velocidad, debe sustentarse en
rodamientos de bolas o sobre casquillos de bronce poroso autolubricantes.
La velocidad de estos motores depende de la carga: a más
carga, menos velocidad y viceversa. Esta propiedad y el poseer un elevado par
de arranque son lo más característico de los motores universales.
Principio de funcionamiento
Los motores monofásicos de inducción
experimentan una grave desventaja. Puesto que sólo hay una fase en el devanado
del estator, el campo magnético en un motor monofásico de inducción no rota. En
su lugar, primero pulsa con gran intensidad, luego con menos intensidad, pero permanece
siempre en la misma dirección. Puesto que no hay campo magnético rotacional en
el estator, un motor monofásico de inducción no tiene par de arranque.
Si pensamos en un motor de un solo
par de polos, podemos ver fácilmente que el campo generado por el devanado principal
al conectarse a una fuente de tensión alterna, tiene una dirección fija y un
signo cambiante en forma sinusoidal. Los motores de inducción requieren un campo
magnético rotante para inducir las corrientes adecuadas en el rotor y producir
un par mecánico.
Si el campo magnético es fijo en el
espacio y alterno en el tiempo y el rotor se halla detenido (por ejemplo al
intentar arrancarlo) el circuito electromagnético resultante se asemeja mucho
al de un transformador en cortocircuito, donde el rotor haría las veces de
secundario. Para comprender el funcionamiento de éstas máquinas debemos
imaginar que el campo magnético alterno es en realidad la composición de dos
campos de módulos constantes pero rotantes en sentidos opuestos. En la figura se
esquematiza esta construcción abstracta en la que ahora se tiene el equivalente
a dos motores trifásicos conectados en secuencias opuestas y unidos por su eje.
Si por algún medio,
en cambio, se impulsara el rotor en un sentido cualquiera se induciría
instantáneamente un par en el eje que aceleraría la máquina hasta alguna
velocidad de equilibrio con el par resistente (en vacío, las pérdidas mecánicas
propias). Entonces el motor monofásico puede pensarse como dos motores
trifásicos opuestos en los que uno prevalece sobre el otro al definirse
externamente un sentido de giro.
De ésta forma los rotores no giran ya que en un caso ideal
los momentos inducidos a cada lado del eje son iguales y opuestos. Como ya se
conoce de la teoría de motores trifásicos, los campos magnéticos rotantes
inducen un momento en los rotores que varía con la velocidad de éstos últimos.
La curva de torques que generan el campo 1 y 2 se ilustra en
la figura (3) donde se puede ver que al sumarse los efectos (zona sombreada) no
se obtiene ningún par resultante con el rotor detenido. Así llegamos a la
característica principal de los motores de inducción monofásicos: no pueden arrancar
por sí solos.
Aplicaciones según el tipo de motor
Motores de inducción de fase partida
Este tipo de motor tiene una buena
eficacia y un par de arranque moderado. Son muy utilizados como motores de
accionamiento para lavadoras, secadoras y lavavajillas.
Motores de inducción de arranque por
condensador
Tienen el mismo rendimiento durante
el funcionamiento que los motores de fase partida, pero un par de arranque más
elevado. Se utilizan principalmente en sistemas de accionamiento de lavadoras.
Motores de condensador dividido
permanente
Las principales características de
este motor son su alta eficiencia, el funcionamiento silencioso y la
reversibilidad continua. Esto hace que sea adecuado para una amplia gama de
electrodomésticos, tales como lavadoras, secadoras, ventiladores y aparatos de
aire acondicionado.
Motores de polos partidos
Son adecuados para aplicaciones de
baja potencia (menos de 200 W). Se utilizan habitualmente en ventiladores
domésticos pequeños
Realizado por:
ZUANNY ROMERO
LUIS MALDONADO
CARLOS GONZALEZ